






BOSM - Kab rov tav Counter Drilling thiab tho txawv tshuab
1. Khoom siv:
BOSM kab rov tav txee drilling thiab tho txawv tshuab yog lub tshuab tshwj xeeb rau koj lub tuam txhab ua cov khoom siv crane ntauwd. Lub Tshuab yog nruab nrog 2 txheej ntawm kab rov tav drilling thiab tho txawv lub taub hau, uas tuaj yeem paub txog drilling, milling thiab tho txawv ntawm workpieces nyob rau hauv qhov kev ua haujlwm zoo. Txiav thiab lwm yam kev ua, cov khoom siv qhov chaw ceev ceev, kev ua haujlwm raug siab, thiab kev ua haujlwm siab.
2. Cov yam ntxwv ntawm cov khoom siv:
2. 1. Cov khoom tseem ceeb ntawm covTshuab
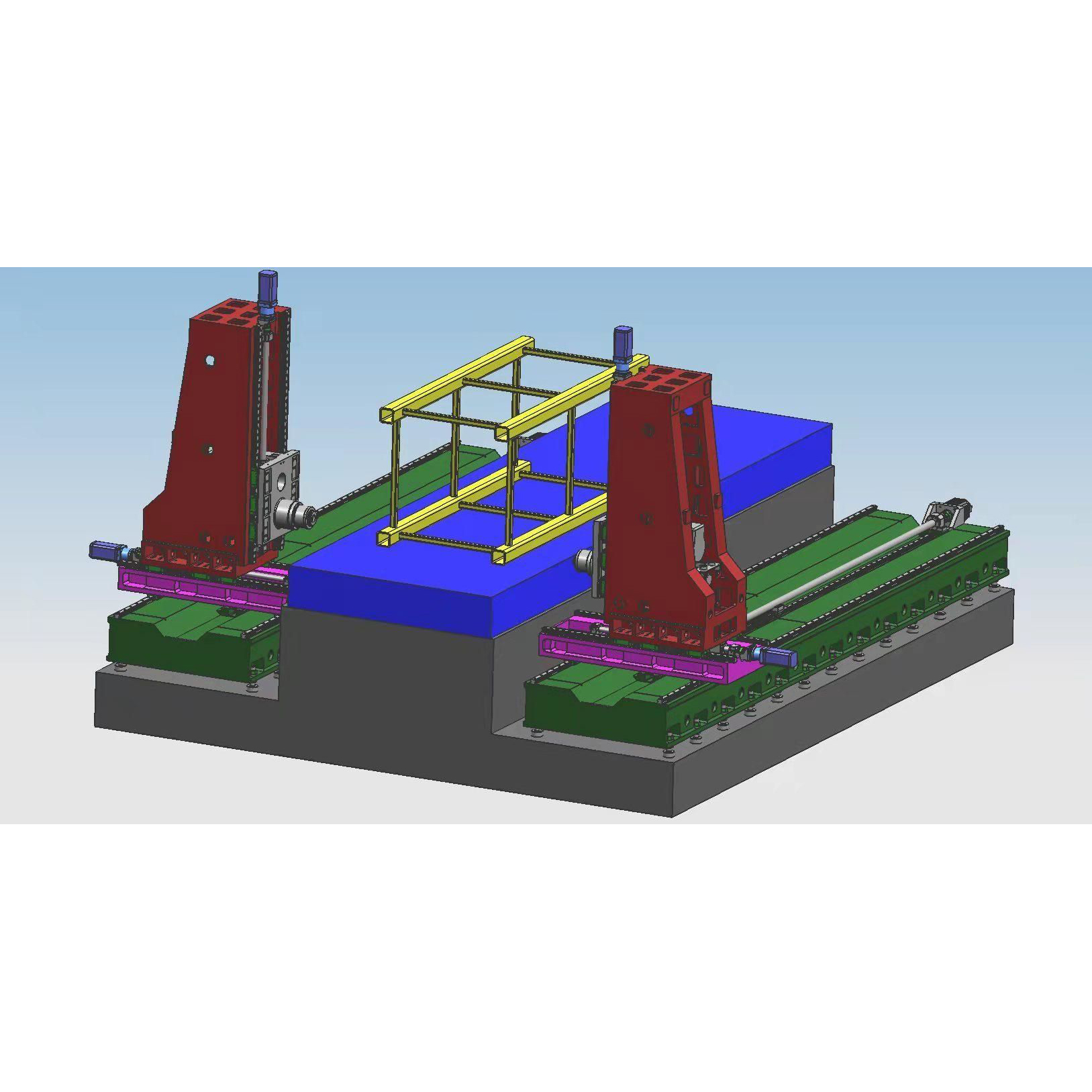
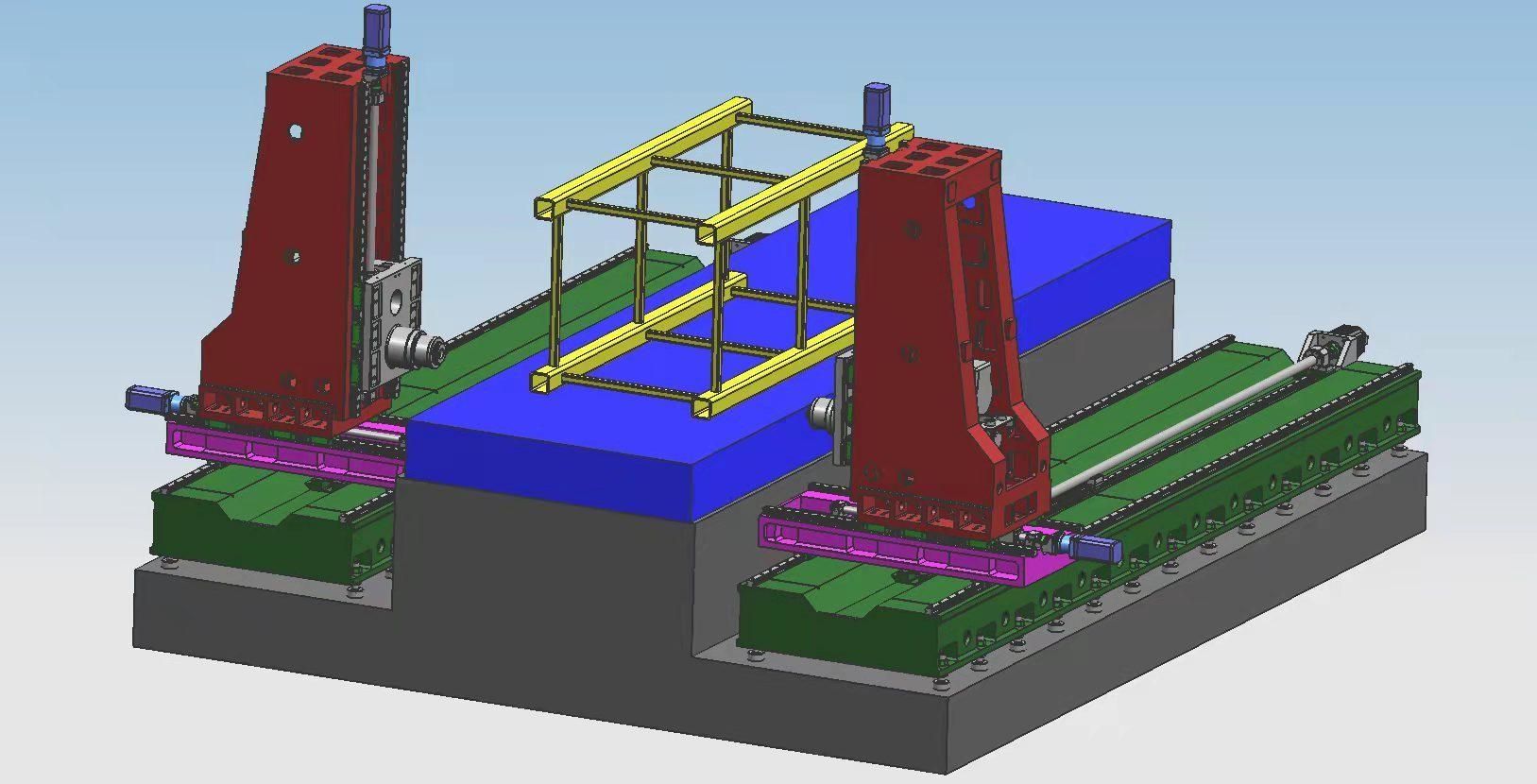
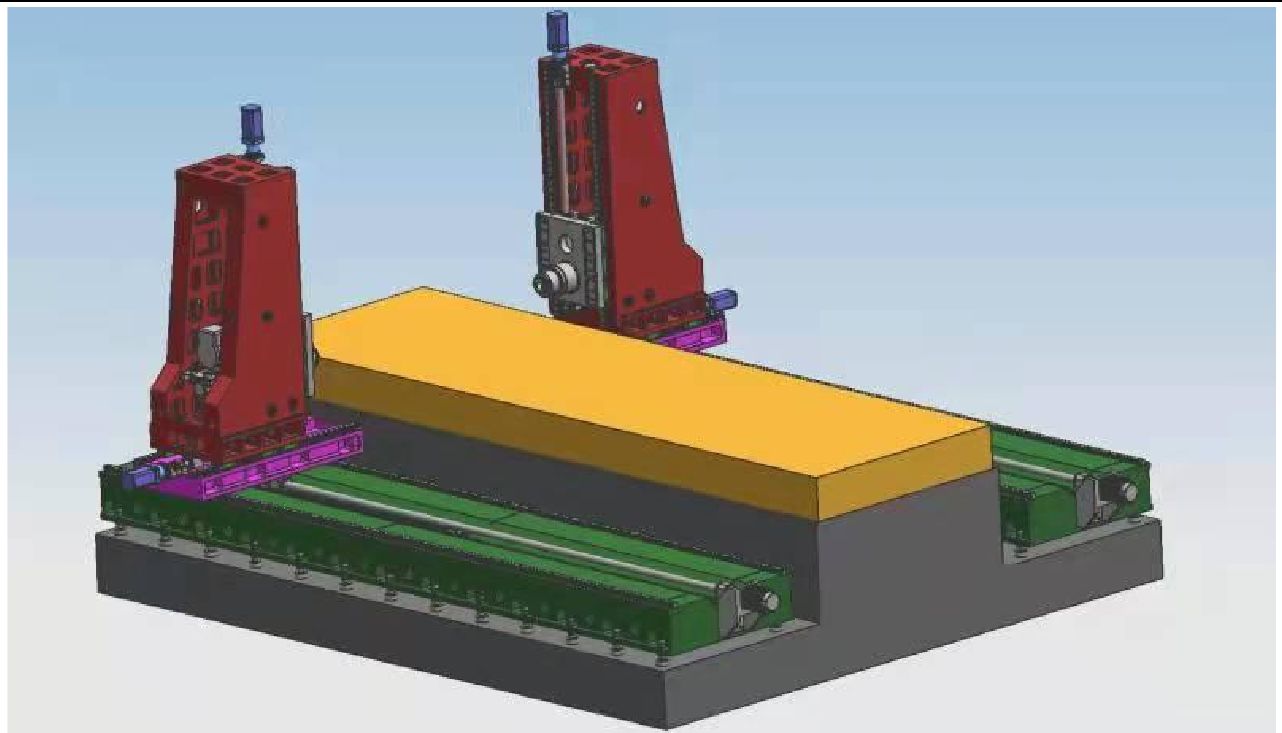
Lub ntsiab Cheebtsam ntawm lub tshuab: txaj, worktable, sab laug thiab txoj cai kab, eeb, rams, thiab lwm yam, loj qhov chaw yog ua los ntawm resin xuab zeb molding, high-zoo grey hlau 250 casting, annealed nyob rau hauv kub xuab zeb → kev co laus → kub Rauv annealing → vibration aging → Rough machining → vibration aging → cub annealing → vibration aging → tiav kom tshem tawm tag nrho kev ntxhov siab tsis zoo ntawm qhov chaw thiab ua kom qhov kev ua tau zoo ntawm cov khoom ruaj khov. Lub workbench ntawm cov cuab yeej yog tsau, thiab lub hwj chim taub hau ntawm ob sab tuaj yeem txav mus rau pem hauv ntej thiab nram qab cov lus qhia ntawm lub hauv paus; Lub Tshuab muaj kev ua haujlwm xws li drilling, tho txawv, countersinking, tapping, thiab lwm yam. Cov txheej txheem txias ntawm lub cuab yeej yog cua txias nrog rau sab nraud txias. Lub Tshuab muaj 5 axes pub, 2 txiav lub hwj chim taub hau, uas tuaj yeem synchronized nrog 5 axes tib lub sijhawm, lossis tuaj yeem ua ib leeg. Lub axial kev taw qhia ntawm lub tshuab thiab lub hwj chim lub taub hau yog qhia nyob rau hauv daim duab hauv qab no.
2. 2 Lub ntsiab qauv ntawm axial kis tau tus mob pub ib feem
2.2.1 X axis: Lub hwj chim lub taub hau reciprocates tom qab raws cov kev taw qhia rail ntawm lub hauv paus.
X1-axis tsav: AC servo lub cev muaj zog ntxiv rau qhov siab-precision planetary reducer yog siv los tsav lub zog lub taub hau los ntawm lub pob ntsia hlau tsav kom paub txog cov kab lus ntawm X-axis.
X2-axis kis tau tus mob: AC servo lub cev muaj zog ntxiv rau qhov siab-precision planetary reducer yog siv los tsav lub zog lub taub hau los ntawm lub pob ntsia hlau xa mus kom paub txog X-axis linear suab.
Daim ntawv qhia kev tsheb nqaj hlau: Ob lub zog siab precision linear qhia kev tsheb ciav hlau yog cov nplais ntawm lub hauv paus dav.
2.2 Y1 axis: Lub taub hau fais fab reciprocates nce thiab nqis ntawm kab.
Y1-axis tsav: Txais AC servo lub cev muaj zog tsav los ntawm lub pob ntsia hlau kom paub cov lus tsa suab ntawm Y1-axis. Daim ntawv qhia kev tsheb ciav hlau: 4 daim ntawm 45 hom kab qhia kev tsheb ciav hlau.
2.2.3 Y2 axis: Lub taub hau fais fab reciprocates nce thiab nqis ntawm kab.
Y2-axis kis tau tus mob: AC servo lub cev muaj zog yog siv los tsav los ntawm lub pob ntsia hlau kom paub cov kab lus tawm ntawm Y1-axis.
Daim ntawv qhia kev tsheb nqaj hlau: 4 daim ntawm 45 hom kab qhia kev tsheb nqaj hlau.
2.2.4 Z1 axis: Lub hwj chim lub taub hau reciprocates rov qab thiab tawm ntawm lub eeb.
Z1-axis kis tau tus mob: AC servo lub cev muaj zog thiab high-precision planetary reducer yog siv los tsav lub zog ntawm lub pob ntsia hlau kom paub txog cov kab tawm ntawm Z1-axis.
2.2.5 Z2 axis: Lub hwj chim lub taub hau reciprocates rov qab thiab tawm ntawm lub eeb.
Z2-axis kis tau tus mob: AC servo lub cev muaj zog thiab high-precision planetary reducer yog siv los tsav lub zog los ntawm lub pob ntsia hlau kom paub Z2-axis linear tsab ntawv tsa suab.
2.3. nti tshem tawm thiab txias
Muaj cov hlua khi ncaj nraim ntsia rau ntawm ob sab hauv qab ntawm qhov chaw ua haujlwm, thiab cov hlau chips tuaj yeem tawm mus rau hauv cov nti conveyor thaum kawg kom paub txog kev tsim khoom zoo. Muaj lub twj tso kua mis txias rau hauv lub tank txias ntawm lub nti conveyor, uas tuaj yeem siv rau kev ua kom txias hauv + sab nraud ntawm lub cuab yeej kom ntseeg tau tias kev ua haujlwm thiab kev pabcuam lub neej ntawm lub cuab yeej, thiab cov khoom siv txias tuaj yeem rov ua dua.
3. Full digital numerical control system:
3.1. Nrog nti tawg muaj nuj nqi, nti tawg lub sij hawm thiab nti tawg lub voj voog tuaj yeem teem rau ntawm tus txiv neej-tshuab interface.
3.2. Nrog cov cuab yeej lifting muaj nuj nqi, lub cuab tam lifting nrug tau teem rau ntawm tus txiv neej-tshuab interface. Thaum qhov kev ncua deb mus txog, lub cuab yeej yuav raug tshem tawm sai, thiab tom qab ntawd cov chips yuav raug muab pov tseg, thiab tom qab ntawd ceev ceev rau pem hauv ntej mus rau qhov chaw drilling thiab txiav hloov mus ua haujlwm.
3.2. Centralized lag luam tswj lub thawv thiab handheld unit txais cov lej tswj qhov system thiab tau nruab nrog USB interface thiab LCD kua siv lead ua zaub. Txhawm rau ua kom yooj yim programming, cia, tso saib thiab kev sib txuas lus, kev ua haujlwm interface muaj cov haujlwm xws li kev sib tham ntawm tus txiv neej-tshuab, kev ua yuam kev yuam kev, thiab lub tswb tsis siv neeg.
3.2.. Cov cuab yeej muaj lub luag haujlwm ntawm kev saib ua ntej thiab rov tshuaj xyuas lub qhov ua ntej ua haujlwm, thiab kev ua haujlwm yooj yim heev.
4. Tsis siv neeg lubrication
Tshuab precision linear qhia rail khub, precision pob ntsia hlau khub thiab lwm yam high-precision motion khub yog nruab nrog tsis siv neeg lubrication tshuab. Lub twj tso kua mis tsis siv neeg lubricating tso tawm cov roj siab, thiab cov roj lubricator roj chamber nkag mus rau cov roj. Thaum cov roj chamber tau ntim cov roj thiab lub kaw lus siab nce mus rau 1.4 ~ 1.75Mpa, lub siab hloov hauv lub kaw lus kaw, lub twj tso kua mis nres, thiab lub valve unloaded yog unloaded tib lub sijhawm. Thaum cov roj siab nyob rau hauv txoj kev poob qis dua 0.2Mpa, lub lubricator kom muaj nuj nqis pib sau lub lubricating point thiab ua tiav ib qho roj filling. Vim qhov tseeb ntawm cov roj muab los ntawm cov roj ntau ntau thiab muaj peev xwm txheeb xyuas qhov system siab, cov khoom siv roj yog txhim khu kev qha thiab xyuas kom meej tias muaj cov roj zaj duab xis nyob rau saum npoo ntawm txhua tus khub kinematic, uas txo kev sib txhuam thiab hnav thiab tiv thaiv kev puas tsuaj. mus rau lub internal qauv tshwm sim los ntawm overheating. , los xyuas kom meej qhov tseeb thiab lub neej ntawm Lub Tshuab.
5. Tshuabsiv ib puag ncig:
Fais fab mov: Peb-theem AC380V ± 10%, 50Hz ± 1 Ambient kub: -10 ° ~ 45 °
6. Kev lees txais cov qauv:
JB / T10051-1999 "Cov Lus Qhia Tshwj Xeeb rau Hydraulic System ntawm Hlau Txiav Machine"
7. Technical parameters:
| Qauv | 2050-5 ZPO | |
| Kev ua haujlwm siab tshaj plaws workpiece loj | Length × dav × qhov siab (mm) | 5000 × 2000 × 1500 hli |
| ua hauj lwm rooj loj | Length X Dav (mm) | 5000 * 2000 hli |
| Lub zog lub taub hau puag ncig kev taug kev | Txav mus thiab tawm mus (mm) | 5000 |
| Lub zog taub hau nce thiab nqis | Up thiab down stroke ntawm ram (mm) | 1500 |
|
Kab rov tav ram hom drilling fais fab taub hau Lub taub hau 1 2 | Ntim (2 pcs) | 2 |
| Spindle taper | BT50 | |
| Drilling txoj kab uas hla (mm) | Φ2-Φ60 | |
| Txoj kab uas hla (mm) | M3-M30 | |
| Spindle ceev (r / min) | 30-3000 | |
| Servo spindle lub cev muaj zog (kw) | 22 * 2 | |
| Sab laug thiab txoj cai taug kev (mm) | 600 | |
| Bidirectional Positioning raug | 300mm * 300 hli | ± 0.025 |
| Bi-directional rov positioning raug | 300mm * 300 hli | ± 0.02 hli |





